
.png)





|
인공근육은 인간 근육을 모방한 것이다. 전통적인 모터에 비해 유연하고 자연스러운 움직임을 제공해 소프트 로봇이나 의료기기, 웨어러블 장치에 쓰는 기본 소자이다. 인공근육은 전기, 공기 압력, 온도 변화 같은 외부 자극에 반응해 움직임을 만들어 내는데, 인공근육을 활용하려면 이 움직임을 정교하게 제어해야 한다.
기존에 쓰던 모터 기반 스위치는 딱딱하고 부피가 커 제한된 공간 안에서 사용하기 어려웠다. 이에 연구팀은 좁은 관 속에서도 큰 힘을 내며 유체 흐름을 제어할 수 있는 이온성 고분자 인공근육을 개발해 소프트 유체 스위치로 활용했다.
|
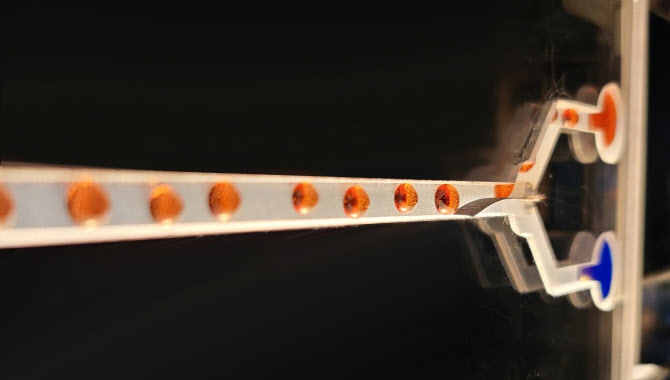
그 결과, 머리카락 정도의 얇은 180um 두께로 인공근육을 제작했다. 가벼운 무게(10mg) 대비 34배 이상의 힘을 내며 부드러운 움직임을 보였다. 연구팀은 낮은 전력으로 유체 흐름 방향도 정교하게 제어했다.
오일권 교수는 “초저전력으로 작동하는 전기화학적 연성 유체 스위치는 유체 제어 기반 소프트 로봇, 소프트 일렉트로닉스, 미세유체공학 분야에서 많은 가능성을 열어줄 수 있다”며 “이 기술은 우리 일상에서 초소형 전자 시스템에 적용해 산업현장에서 바로 활용할 잠재력이 있다”고 말했다.
연구 결과는 지난 달 13일에 국제 학술지 ‘사이언스 어드밴스드(Science Advances)’에 게재됐다.


![최민수·강주은 부부 사는 서래마을 최고급 빌라는[누구집]](https://image.edaily.co.kr/images/vision/files/NP/S/2026/05/PS26051000020t.jpg)



