
.png)




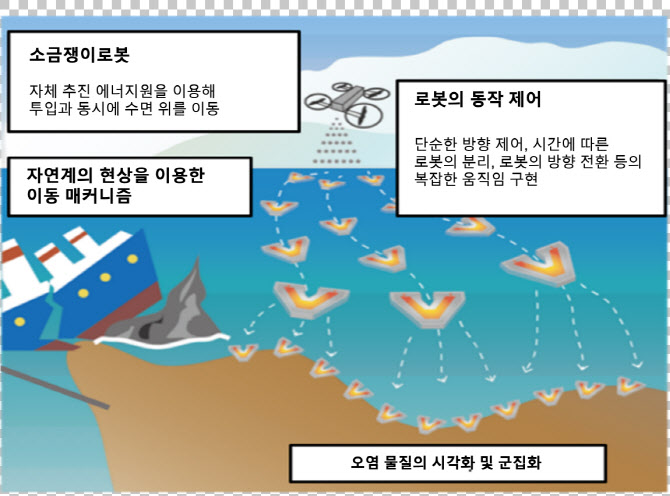
소금쟁이가 물 위를 움직이는 마랑고니 효과를 응용해, 수면 위를 움직이도록 설계했다.
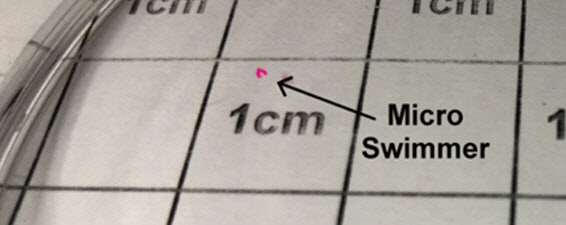
크기가 작은 로봇은 동작 제어 장치를 로봇에 포함하기 어려워 외부 장치를 통해 움직임을 제어하는데, 박욱 교수 연구팀이 개발한 로봇은 외부 장치 없이 다양한 움직임을 구현할 수 있어 의의가 있다.
연구 결과는 세계적인 학술지 <네이처 커뮤니케이션(Nature Communications)에 게재됐다.
|
|
지난해 코로나19 펜데믹 영향으로 4차 산업혁명을 이끄는 신기술들이 빠르게 발전하고 있다.
특히 로봇 공학에서는 인공지능 발전과 맞물려 운송 로봇 발전이 눈부시다. 일반적으로 로봇은 복잡한 기계장치, 센서, 구동계 등을 포함해 작게 만들기 힘들다. 먼지 같이 작은 마이크로미터 크기의 로봇은 구성 요소를 구현하기 어려워 상대적으로 연구도 적다. 크기가 작아 동작 제어 장치를 로봇에 포함하기 어려워, 외부에서 전기장, 자기장을 이용해 로봇의 동작을 제어해야 하는 문제가 있기 때문이다.
경희대학교(총장 한균태) 전자공학과 박욱 교수 연구팀이 서울대학교 전기정보공학과 권성훈 교수, 하버드대학교 뷔즈 연구소(Wyss Institute)의 최영재 박사와 공동연구를 진행해 마이크로미터 크기지만 내·외부 조작 없이 처음 제작한 모양만으로 다양한 동작을 선보이는 로봇을 개발했다.
연구 결과는 세계적인 학술지 <네이처 커뮤니케이션(Nature Communications), (IF=14.919)>에 게재됐다.
연구에 참여한 경희대학교 전자공학과 박철헌 박사는 “자연현상에 영감을 얻어 현실에 있는 기술적 난제를 해결하고자 연구했는데, 좋은 결과가 나와 뜻깊다”는 소감을 밝혔다.
마랑고니 효과는 계면을 따라 표면 장력의 크기가 일정하지 않을 때 발생하는 현상이다. 계면활성제에 의해 물 표면 장력이 낮아지고, 이로 인해 유체의 흐름이 표면 장력이 낮은 곳에서 높은 곳으로 발생한다.
소금쟁이가 물 위를 이동하거나 ‘와인의 눈물’과 같은 현상이 마랑고니 효과의 대표적인 사례다. 연구팀은 마랑고니 효과를 응용해, 내·외부 조작 없이 수면 위를 움직이는 로봇을 개발했다.
로봇의 크기가 마이크로미터로 작아, 일반적인 로봇 제작 방식으로 제작하기 어렵다. 또한 내··외부 조작 없이 사전에 제작된 형상을 통해 움직임이 제어되는 만큼 정교한 제조가 필요하다.
연구팀은 반도체 제조공정인 ‘멤스(MEMS) 공정’을 활용해 문제를 극복했다. 이 공정 법은 마이크로미터 크기의 초미세 기계 부품과 전자회로를 실리콘 기판 위에 집적하는 방법이다. 연구팀은 실리콘 기판이 아닌 슬라이드 글라스 상에 전자회로를 집적하고 마이크로 3D 프린팅 기술을 사용해 로봇을 제작했다.
로봇 부품에 시간에 따라 형태가 변하는 고분자를 활용한 점도 이목을 끈다. 시간에 따라 고분자 물질이 변해 로봇의 일부분이 분리되거나, 무게중심이 바뀐다. 연구팀은 형태 변화에 따른 움직임을 계산해 단순한 방향 제어뿐만 아니라 원하는 움직임을 행하도록 설계했다.
|
개발한 로봇은 먼지 크기이기 때문에 규모가 큰 로봇이 움직이지 못하는 인체 내부나 해양에서 활용이 기대된다.
박욱 교수는 “로봇의 부피에 비해 표면적이 넓어 약물을 효율적으로 전달할 수 있고, 바다에 유출된 기름을 검출하는 등 다양한 방면으로 활용할 수 있다”고 설명했다.
연구팀은 마이크로 영역 멤스 기술을 활용한 3D 마이크로패턴, 구조물 제작 기술의 세계적인 권위자로 이를 응용한 위변조방지 기술, DNA 기반 메모리 기술 등 다양한 연구를 진행 중이다.
박 교수는 “이번 연구로 마이크로미터 크기의 로봇으로 다양한 움직임을 구현했다. 전 세계가 경쟁하는 지능형 로봇 개발 분야에 한국의 경쟁력을 선보였다. 앞으로 로봇 분야 국가 경쟁력 상승에 이바지할 것”이라며 자신감을 밝혔다.
최영재 박사는 “앞으로 더 많은 연구가 필요하지만, 사람의 손이 닿을 수 없는 곳에서 다양한 작업을 수행하는 지능형 로봇 개발에 한발자국 다가갔다”며 연구 의지를 다졌다.
이번 연구는 한국연구재단과 교육부 기초과학연구 프로그램, 한국보건기술 R&D 프로젝트, KIST 기관 프로그램, 두뇌한국 21(Brain Korea 21) 플러스 프로젝트의 지원으로 진행됐다.





![[그해 오늘] 승객 모두 비명질러…388명 다친 상왕십리역 열차 사고](https://image.edaily.co.kr/images/vision/files/NP/S/2026/05/PS26050500001t.jpg)
