|
김 교수는 “단순히 로봇 장비를 대여하는 것에 그치지 않고 교육이 포함된 종합 서비스를 ‘작업량에 따라 비용을 지불하는 구독’ 방식으로 검토할 필요가 있다”고 밝혔다. 이어 “우리나라 실정에선 로봇을 단순히 빌려주는 게 아니라 사람과 로봇이 함께 투입되는 형태의 하도급하는 방식이 더 적합할 것”이라고 덧붙였다.
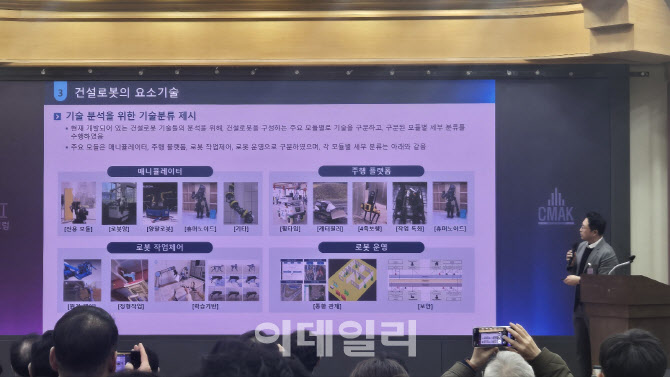
김 교수는 건설 로봇을 △사람의 팔·손 역할을 하는 매니플레이터(Manipulator) △매니플레이터를 이동시키는 주행 플랫폼 △이를 제어할 로봇 작업제어 시스템 △다수의 이종 건설현장에서 로봇의 활동을 모니터링하고 운영하는 형태의 로봇 운영 관제 시스템으로 나눴다. 예컨대 매니플레이터에는 현대엔지니어링의 AI 미장로봇, 볼도의 아스팔트 압축·포장 로봇 등이 있다. 일본 JR의 휴머노이드형 양팔 로봇 등은 원격 제어 시스템의 대표 사례로 꼽힌다.
건설업은 고령화 현상과 숙련 노동자 부족으로 건설 현장의 AI·로봇 활용 필요성이 대두되고 있다. 그러나 로봇이 반복 학습을 하고 정형화된 데이터를 수집하는 제조업과 달리 건설업은 비정형화된 데이터이기 때문에 로봇 개발이나 활용에 어려움이 있다는 지적도 나온다.
김 교수는 “테슬라가 테이터를 획득하는 것을 보면 사람들을 50명씩 세워놓고 공장에서 작업하는 것을 계속 데이터로 취득하나 건설업은 이렇게 하기가 상당히 힘들다”며 “로봇이 천 번을 잘하다가 한 번 이상한 일을 할 수도 있기 때문에 시뮬레이션을 통해서 보완해야 하고, 안전 문제에 대해서도 대비할 필요가 있다”고 설명했다.
로봇 자동화 수준을 어떻게 가져갈 것인지도 관건이다. 김 교수는 “어떤 작업을 원격 조정할 것이냐, 완전 제어할 것이냐 등의 고민에 맞춰서 개발이 돼야 할 것”이라고 설명했다. 이어 “현장에서 특정 한 가지 작업에만 집중해서 개발을 하는 경향이 있는데 이러다보면 건설 공정 과정에서 앞뒤 연결이 안 돼서 사용성이 떨어지는 경우가 있을 수 있다”고 덧붙였다.
또 “실험실에선 잘 작동하다가 건설 현장에만 나가면 안 되는 경우가 있다”며 “통신 문제를 잘 해결하는 것도 중요하다”고 밝혔다.