
.png)
.png)




국내 연구진이 이러한 거미의 먹이잡기에서 착안해 금속이나 세라믹 등을 감지해 붙잡는 거미줄 로봇을 개발했다. 금속이나 세라믹 등 단단한 소재의 로봇을 활용할 수 없는 영역에 적용할 수 있어 소프트 로봇의 잠재력을 끌어올릴 것으로 기대를 모은다.
선정윤·김호영 서울대학교 교수 연구팀은 거미의 행동학적 특성에 착안해 전기로 주변의 물체를 감지해 포획하고, 불필요한 오염물을 스스로 털어내는 거미줄 로봇을 개발했다고 16일 밝혔다.
|
로봇은 수 센티미터 거리 정도 주위에 강력한 전기장을 만들어 주변 물체를 자극해 강한 정전기적 인력으로 달라붙도록 해 물체를 포획한다.
물체 표면에서 나오는 전기장을 감지해 물체와의 상대적 거리를 감지해 실제 접촉하지 않고도 접근을 알아낸다. 충분히 접근했을 때만 물체를 자극해 끌어당기는 방식으로 의도하지 않은 물체에 의한 오염도 피할 수 있다.
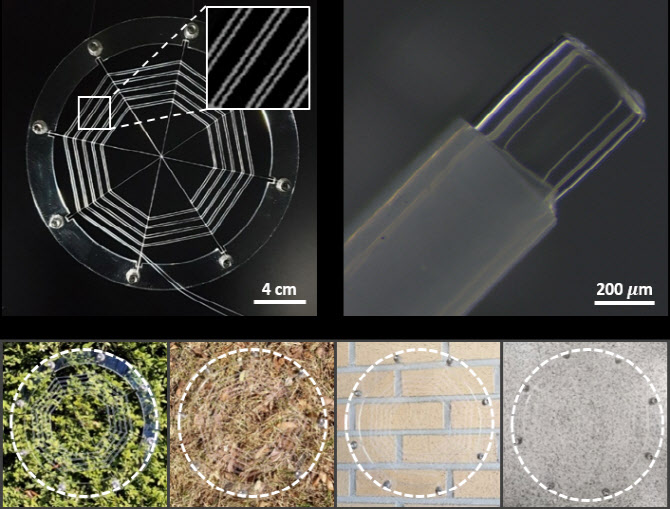
로봇은 젤이나 탄성체 등 신축성 소재로 모든 구성요소가 제작돼 원래 길이의 3배까지 늘어날 수 있다. 이러한 신축성을 기반으로 거미줄 로봇 자체 무게 0.2g 보다 68배나 무거운 물체를 포획할 수 있다. 투명하거나 반투명한 소재로 만들어 다양한 환경에서 위장하기도 쉽다.
연구팀은 차세대 인공 근육, 전자 피부, 로봇 팔 등에 주요 설계 변경 없이도 추가 기능을 부여해 활용범위를 확장시킬 수 있을 것으로 기대했다.
연구 결과는 로봇공학 분야 국제 학술지 ‘사이언스 로보틱스(Science Robotics)’ 저널의 표지논문으로 지난 16일자로 게재됐다.






